Our Mission
Greetings! Our mission is advancing embodied decision-making systems by facilitating their reliability
and generalizability across diverse tasks and environments.
This requires seamless interaction between simulated environments, real-world deployment, and human feedback.
The following figures show our pipeline.
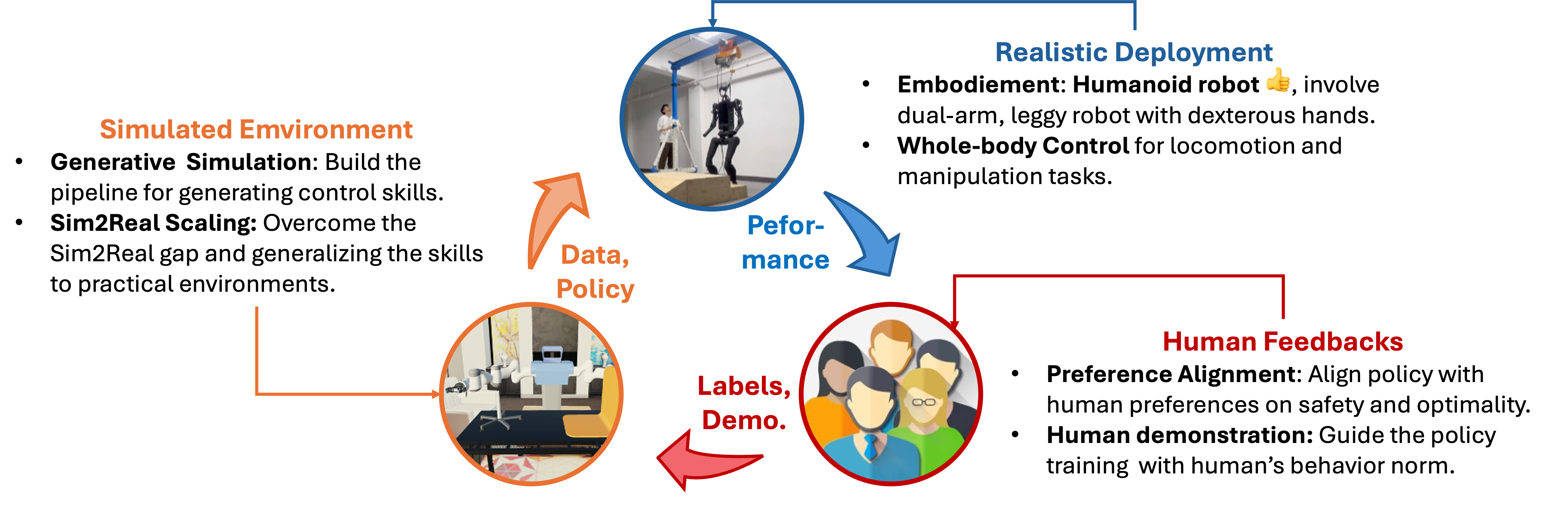
Specifically, our research involves the following aspects:
- Simulated environments:
We follow a generative simulation pipeline that enables the synthesis of infinite robot control data within simulated environments
and facilitates the scaling of this data to practical applications.
The detailed research topics includes:
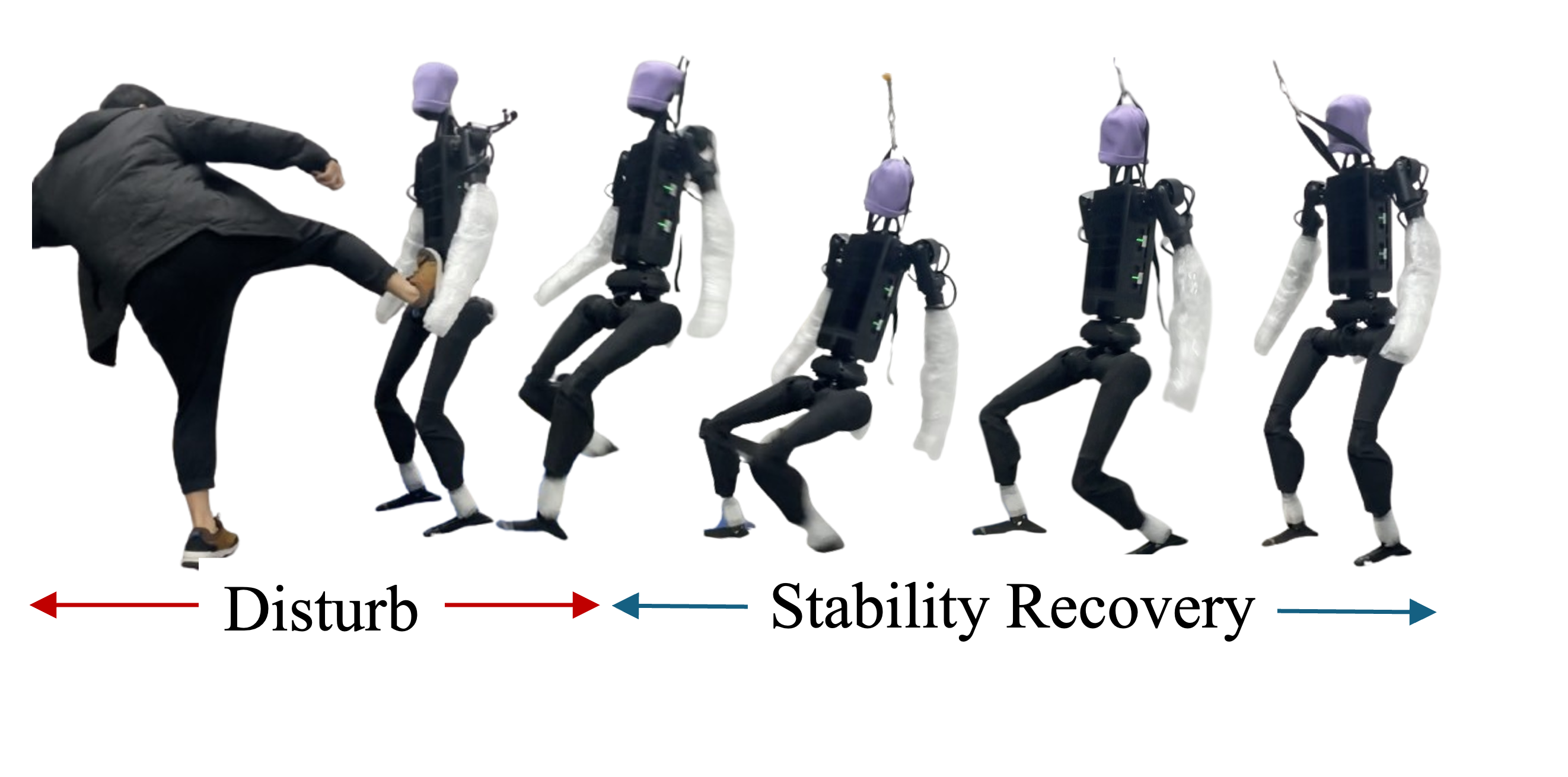
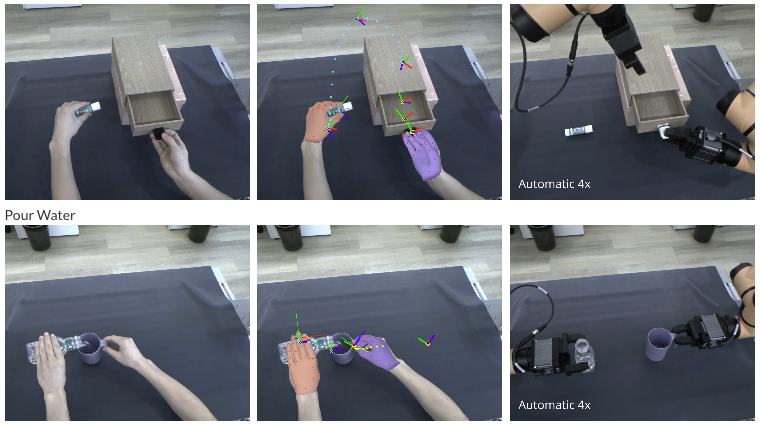
- Sim2Real Deployment:
We aim to address real-world problems, which means the skills and policies we develop must be validated through realistic applications.
Our primary focus is on humanoid robots, specifically, dual-arm, legged robots equipped with dexterous hands.
The detailed research topics includes:
- Leggy Robot Locomotion:
- Dexterous Manipulation:
- Human Feedbacks:
We believe that one of the primary goals of embodied decision-making is to serve humans,
meaning that the decisions made by robots must align with human expectations.
To achieve this goal, we focus on incorporating human feedback into the decision-making process during robot control.
The detailed research topics includes:
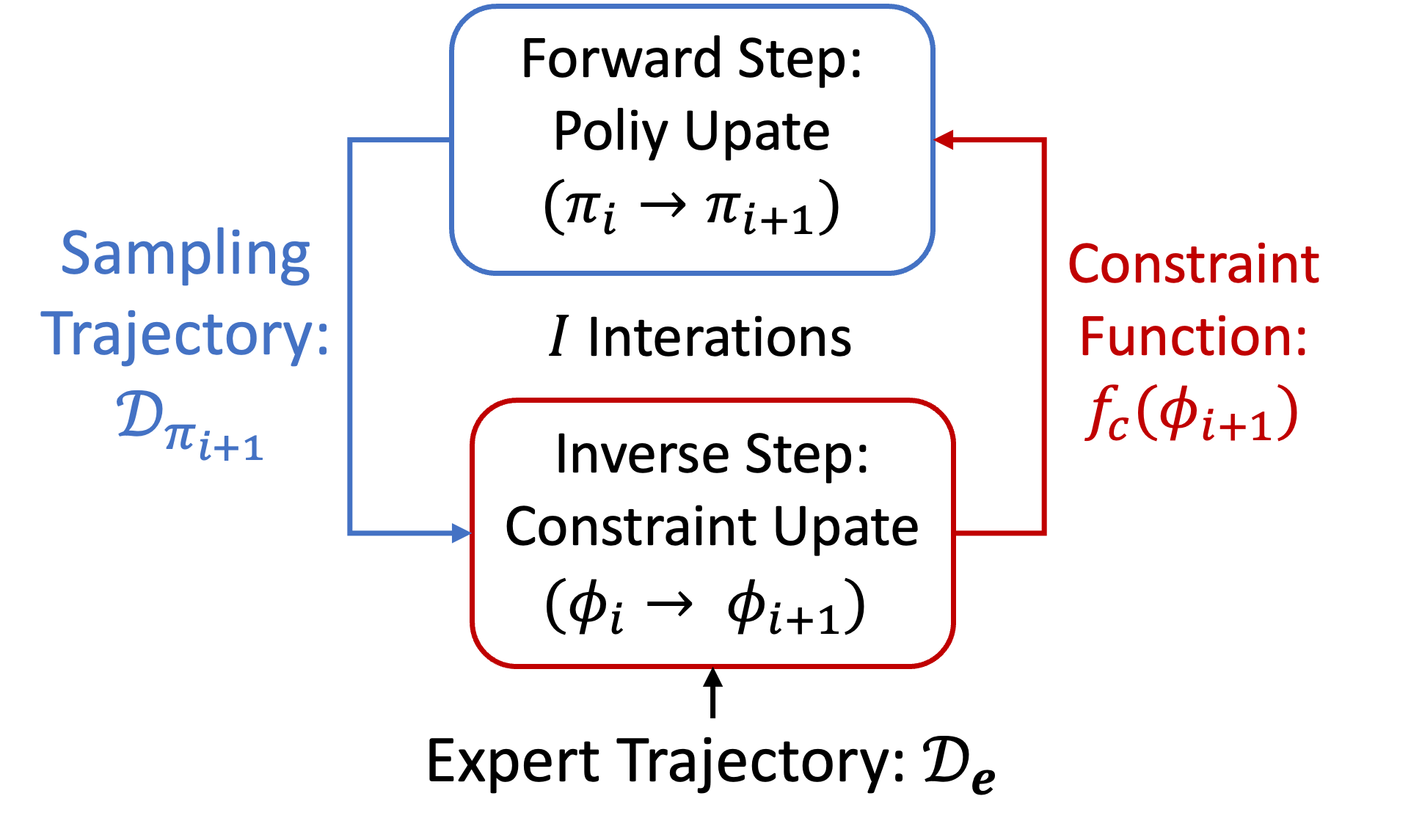
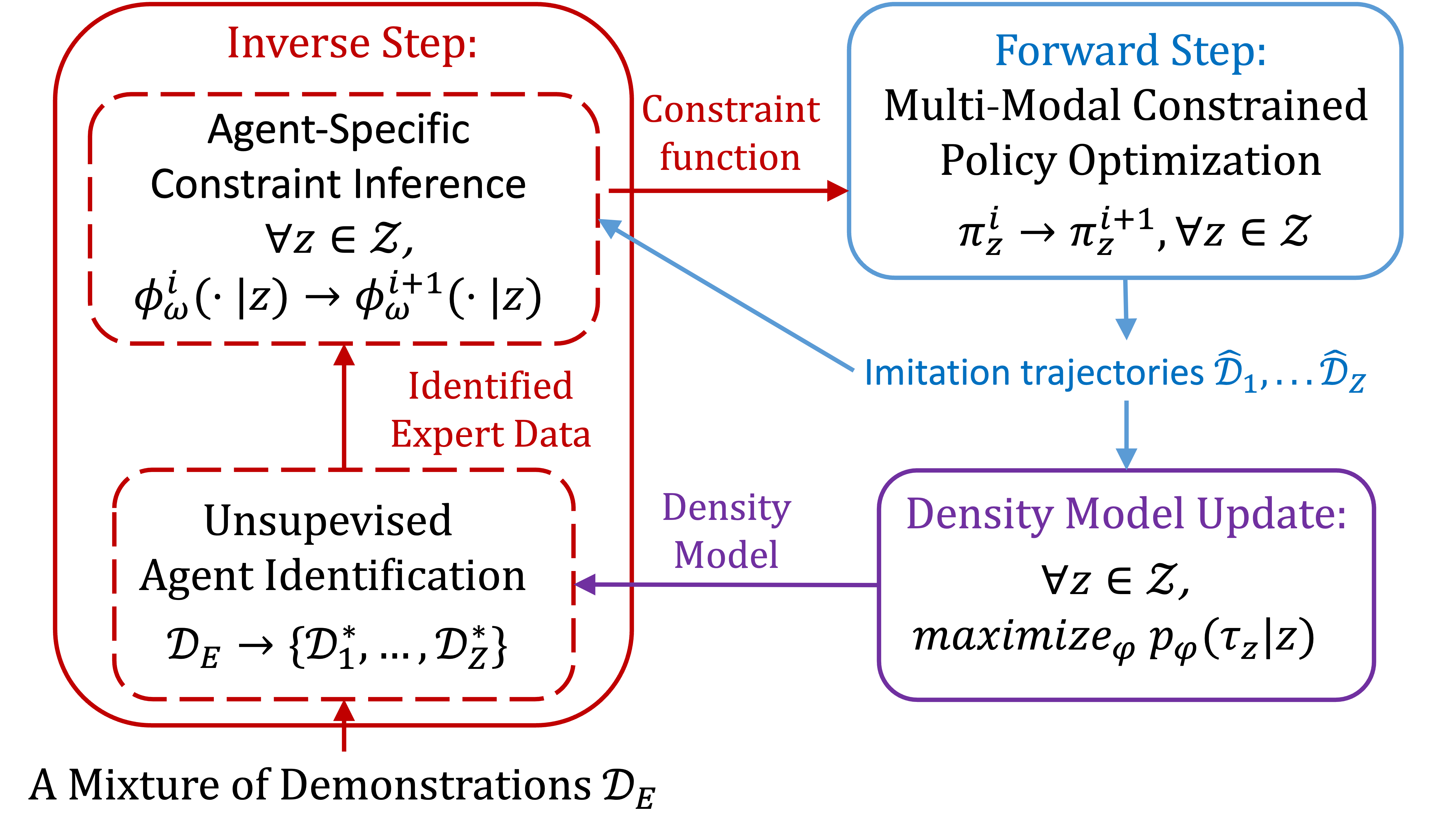
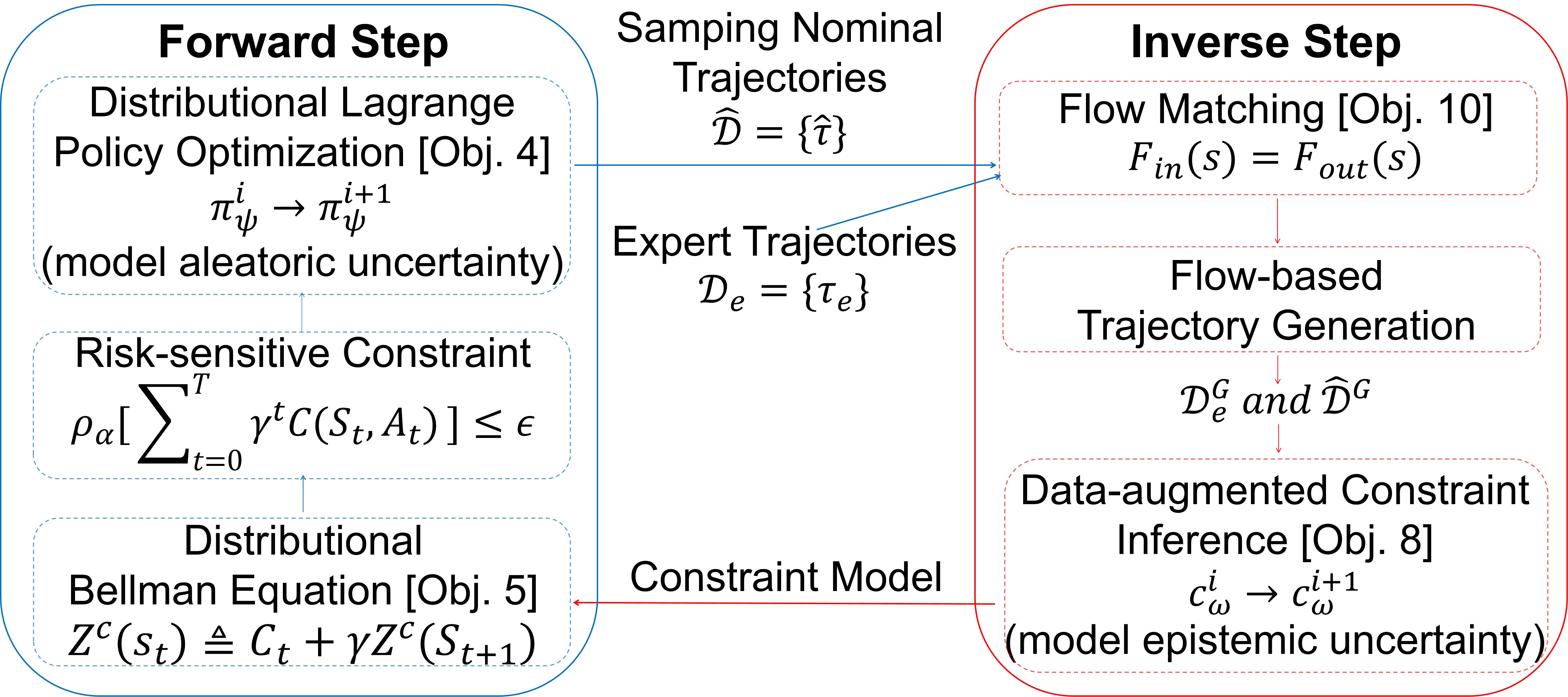
- Inverse Constrained Reinforcement Learning (ICRL):
Additionally, we have a series of works on ICRL, including those published at:
ICLR[23]
[25-1]
[25-2]
ICML[24-1],
[24-2]
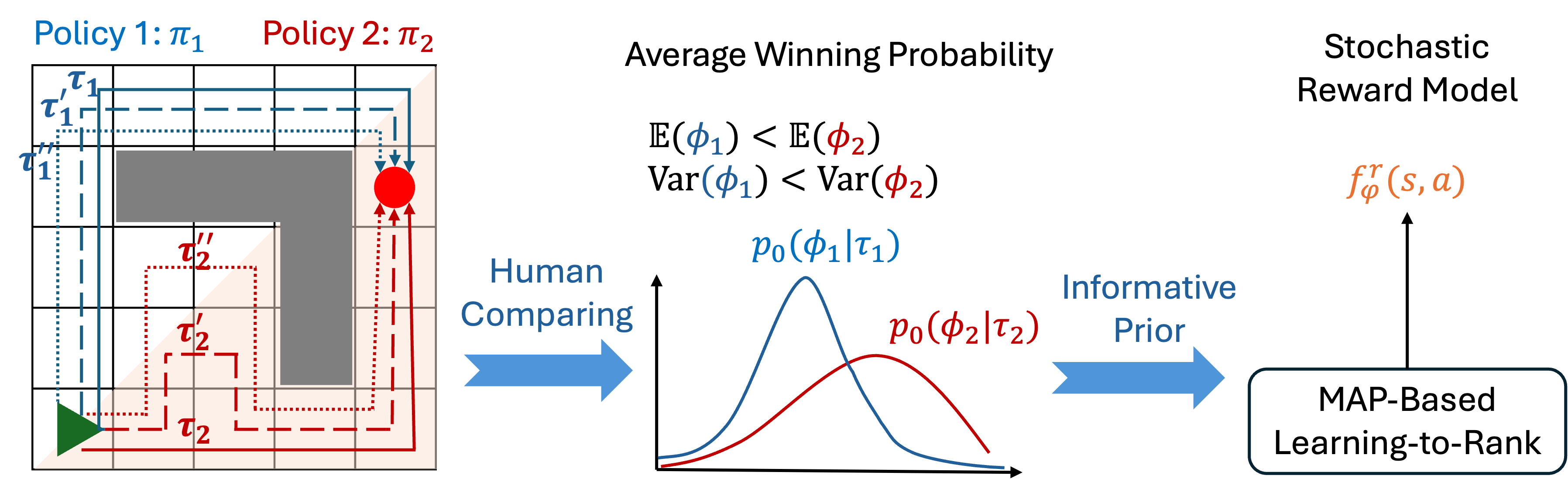
- Reinforcement Learning from Human Feedback (RLHF):
- Human Robot Interaction: