Embodied Decision-Making Research Group
Embodied Decision-Making (EDeM) Lab
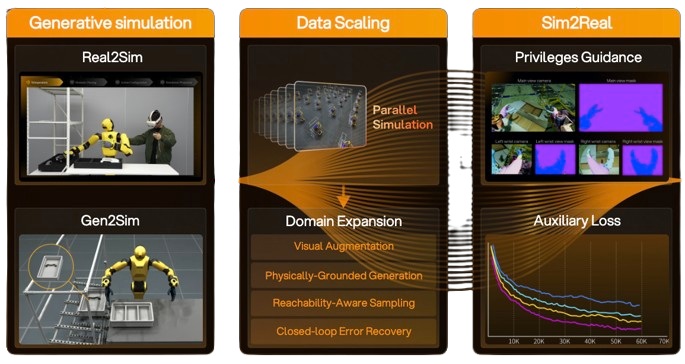
We build embodied agents that can learn broadly, act reliably, and transfer from simulated worlds into
physical environments. Our work connects generative robot data, sim-to-real deployment, and human feedback
so that decision-making systems become more capable, safer, and useful outside the lab.
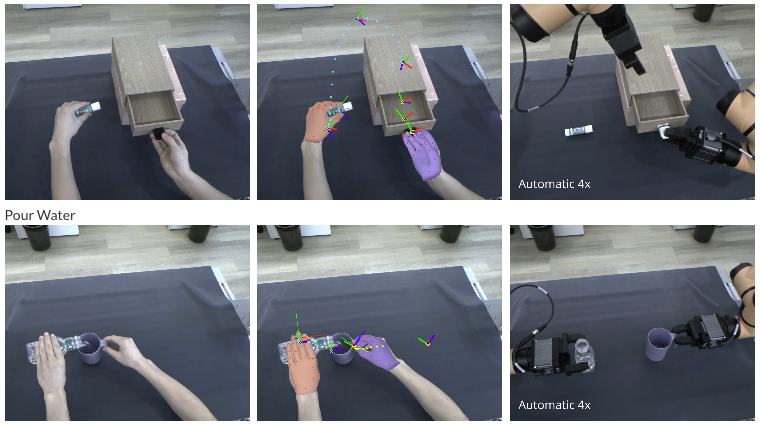
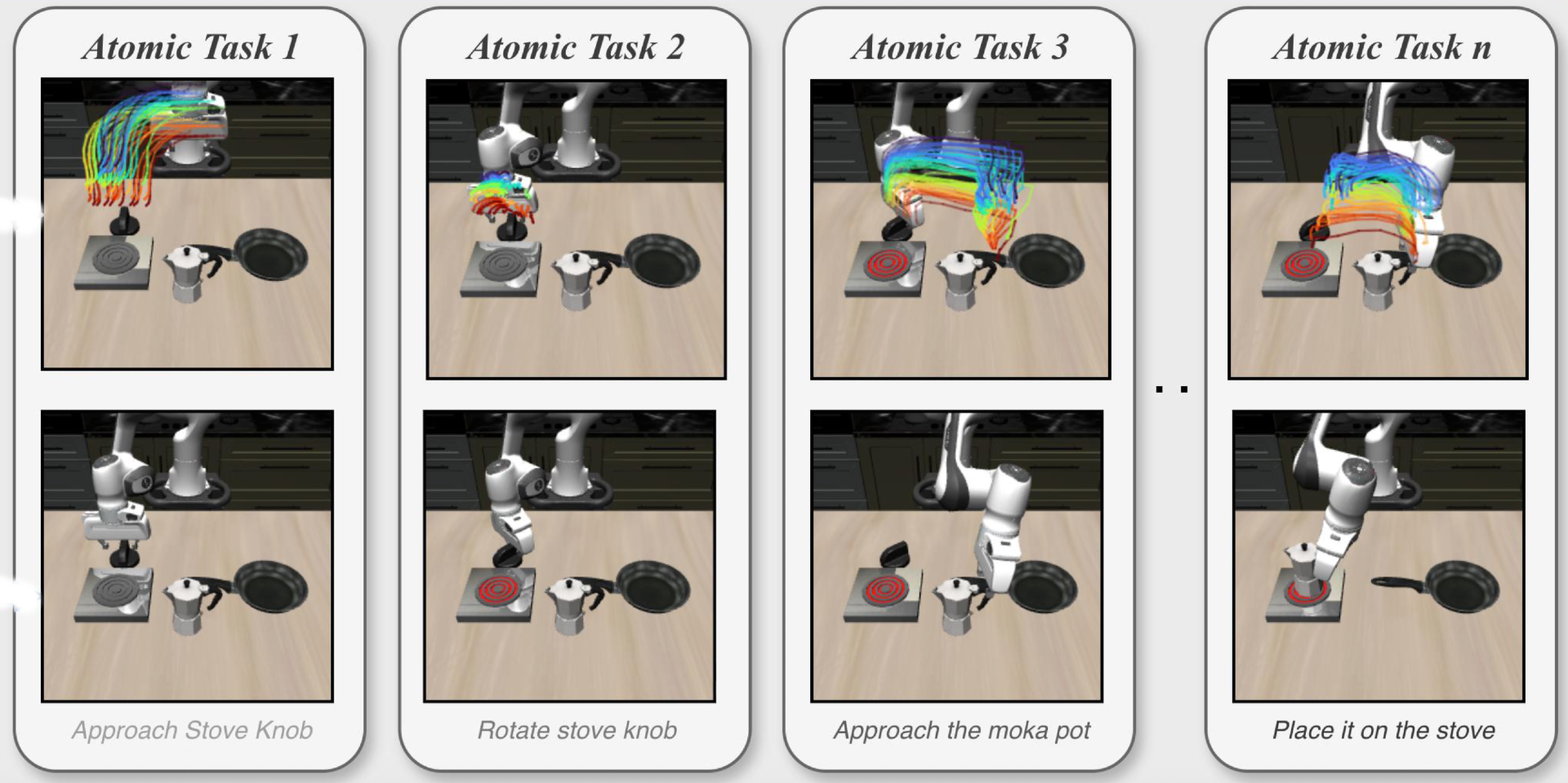
Scalable robot data
Creating richer training pipelines for embodied policies when real-world collection is expensive.
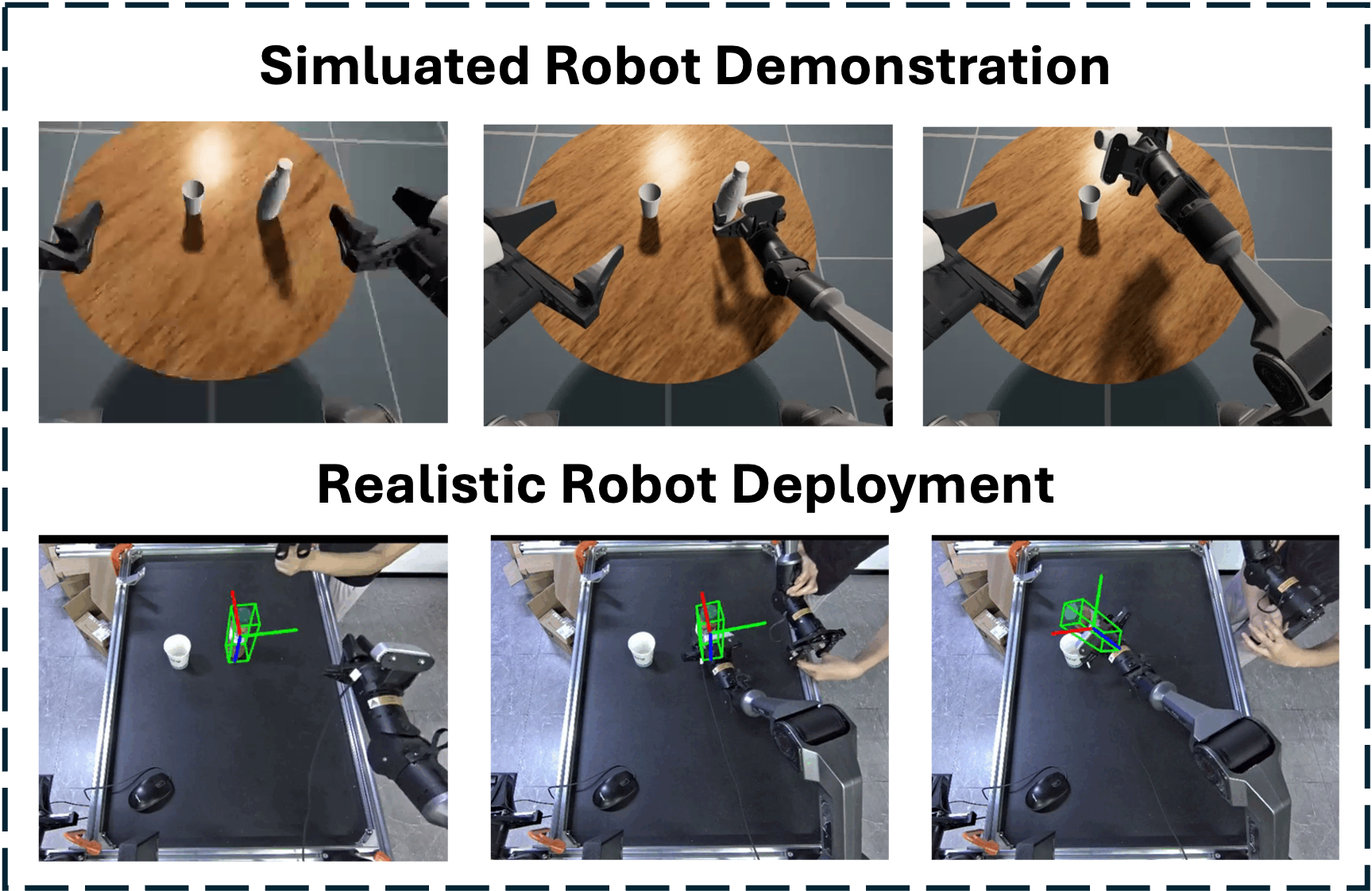
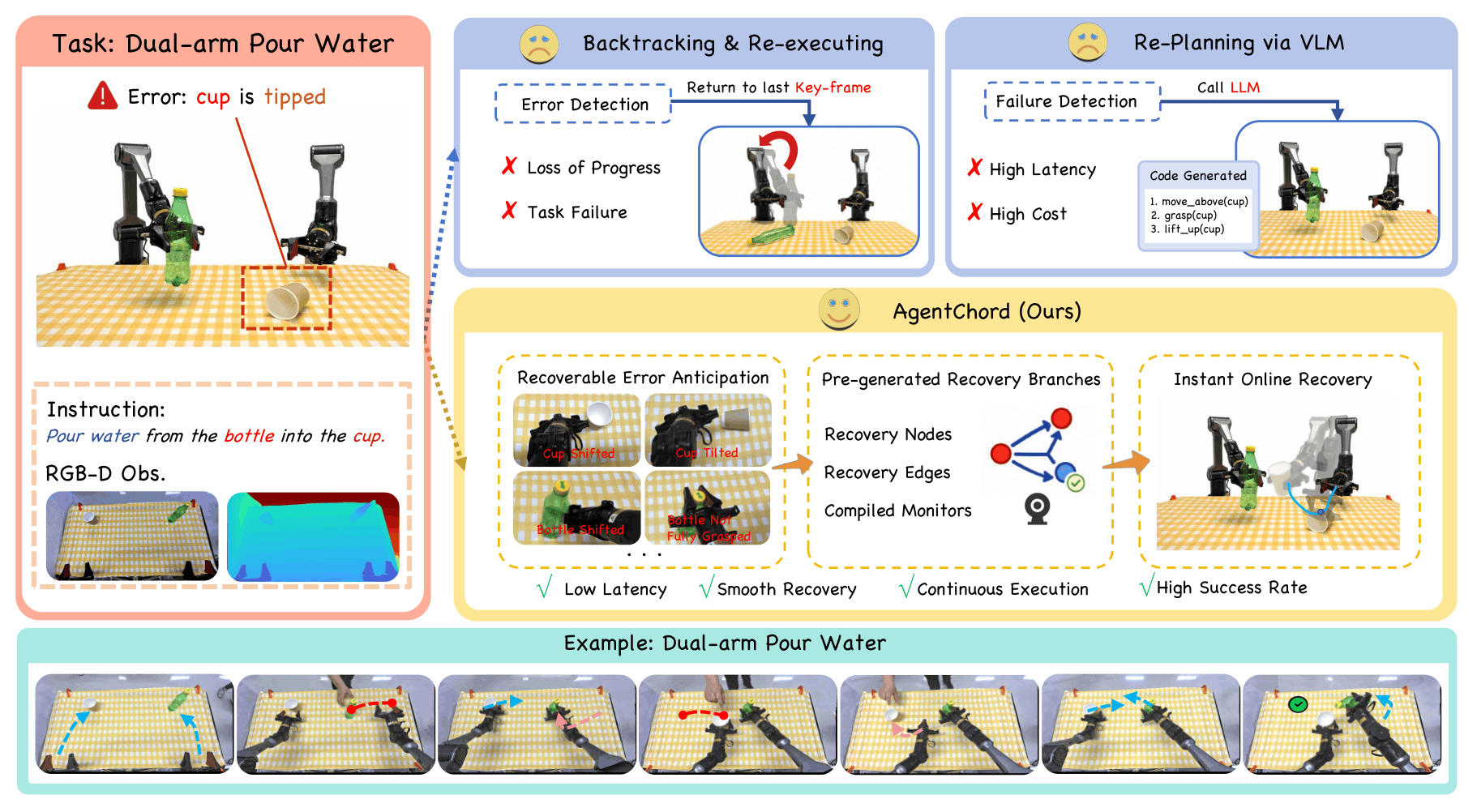
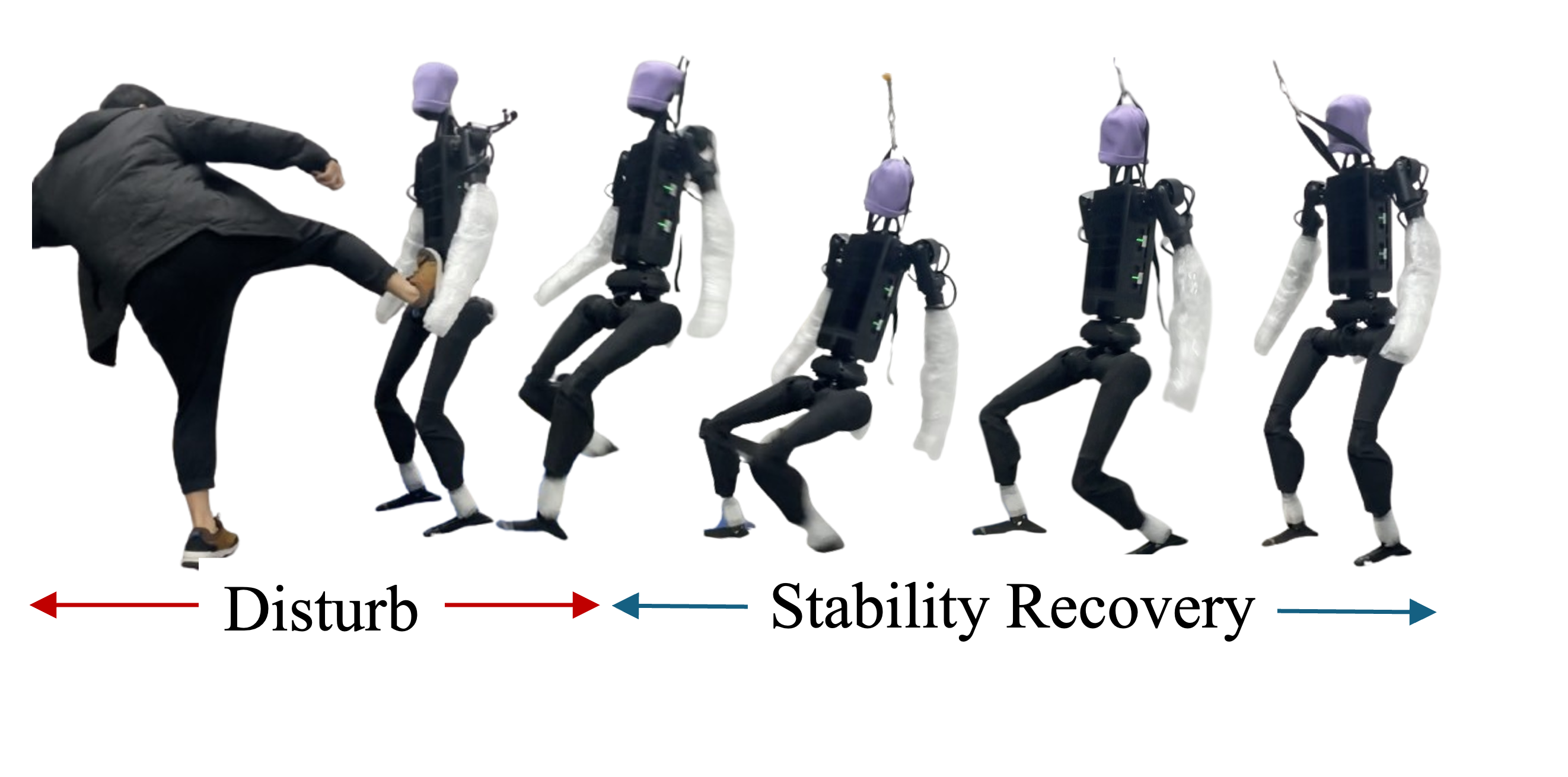
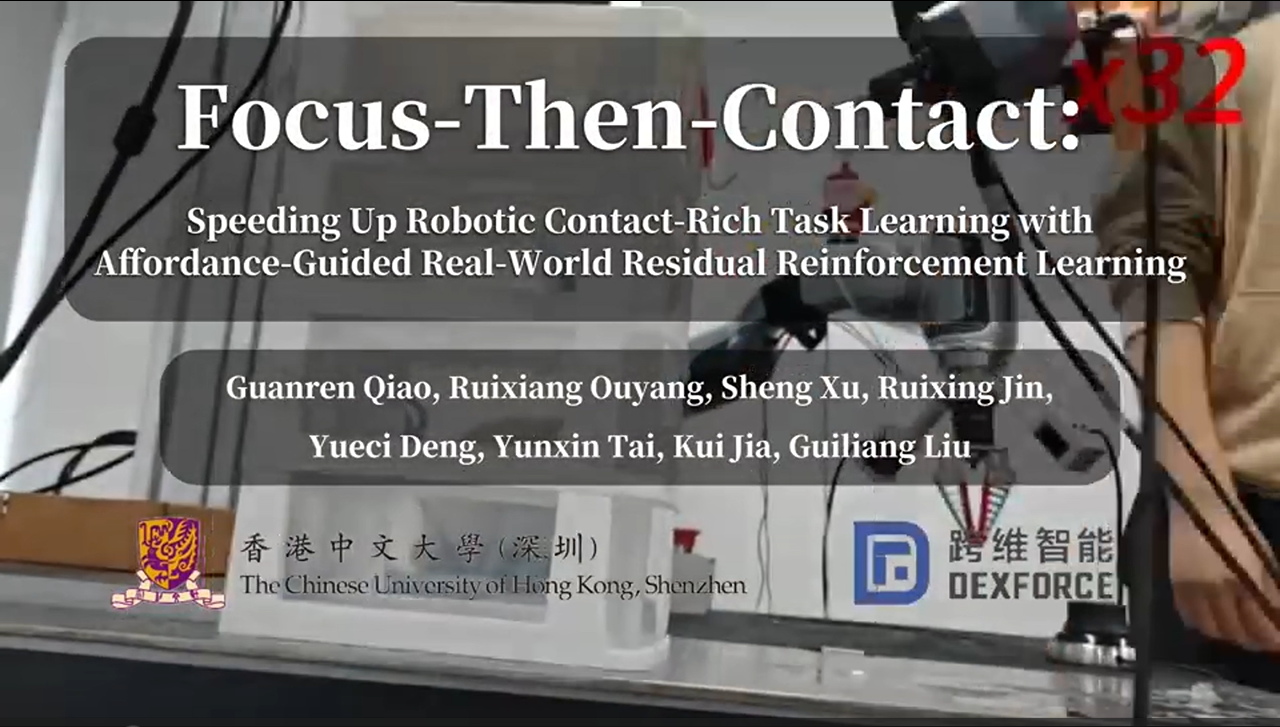
Real deployment
Validating skills on humanoid, dexterous, and interactive robots in realistic tasks.
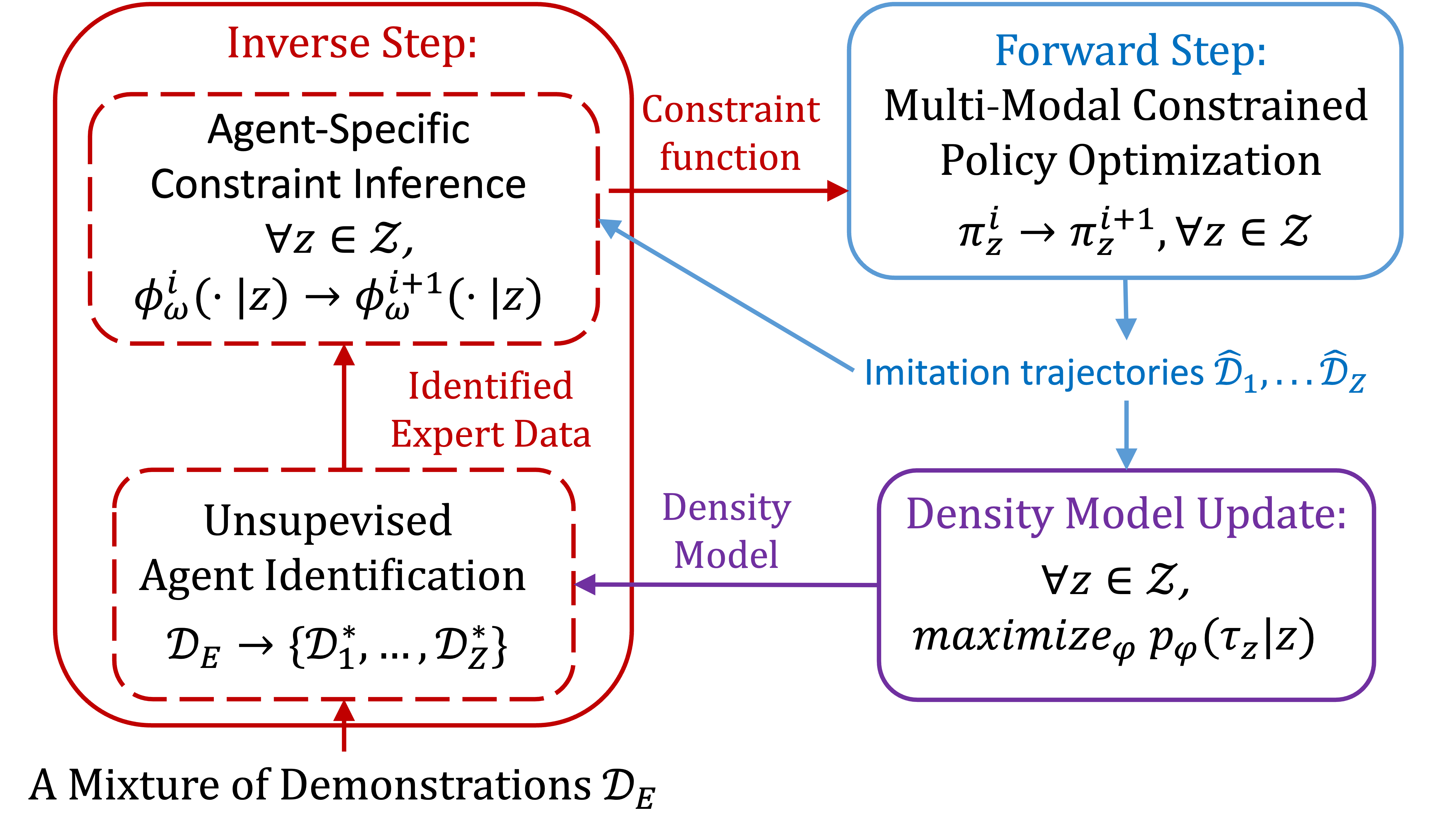
Human alignment
Using feedback and constraints to make robot behavior safer, more interpretable, and trustworthy.
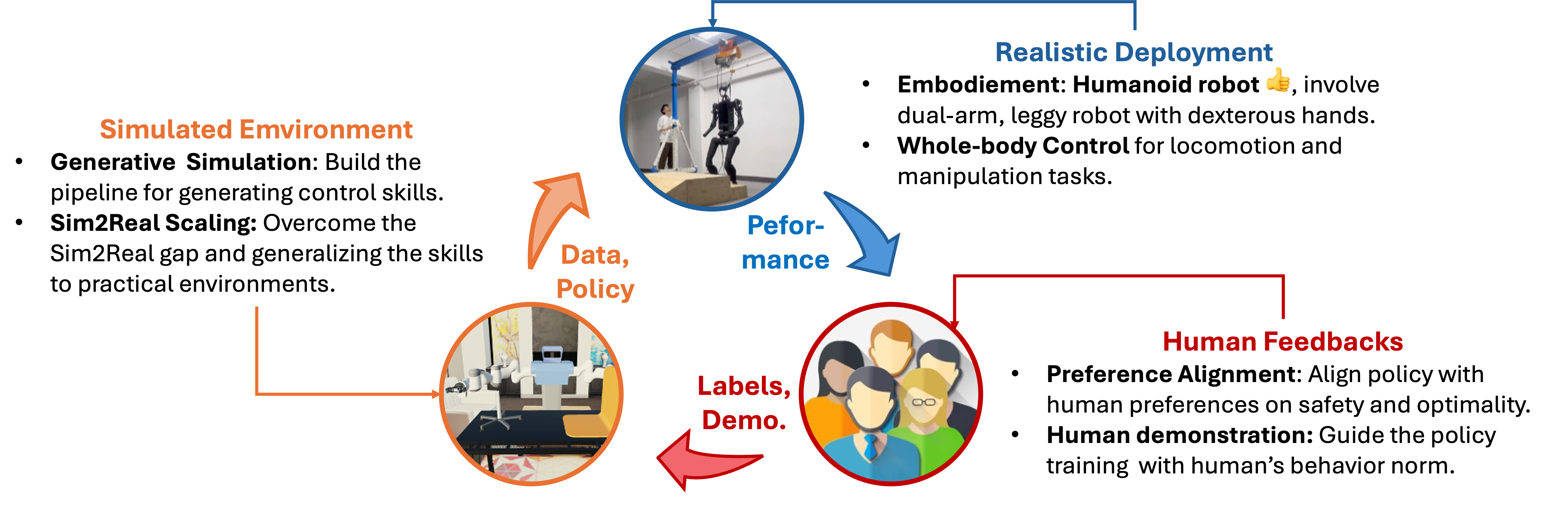
Our Mission
Our mission is advancing embodied decision-making systems by facilitating their reliability and
generalizability across diverse tasks and environments. This requires tight interaction between
simulated environments, real-world deployment, and human feedback.
The following projects are developed by EDeM Lab members and collaborators. Together they push toward
practical embodied intelligence: agents that can reason, learn, move, manipulate, and respond to human intent.